我們在上一回找到了角點,但如何利用關鍵點的周圍資訊,來讓彼此匹配,也許可以把角點周圍的像素區塊取出來匹配,但如果遇到兩張影像角度不同時如何匹配?
SIFT descriptor(SIFT=Scale-Invariant Feature Transform)
建構一個旋轉不變性描述子
- 從 DoG 得到一個帶有尺度不變性的關鍵點
- 從關鍵點周圍資訊找出特徵角度(不直接旋轉個別影像區塊進行匹配,因為很慢)
SIFT 流程

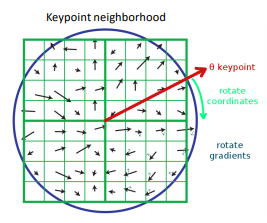
使用影像梯度計算關鍵點周圍的角度直方圖,並把角度切成八等分
把關鍵點周圍梯度值每 4x4 為一群,個別計算旋轉過的梯度方向直方圖
梯度的貢獻程度取決於距離,如果它在兩個直方圖位置的中間,它給兩個直方圖一半的貢獻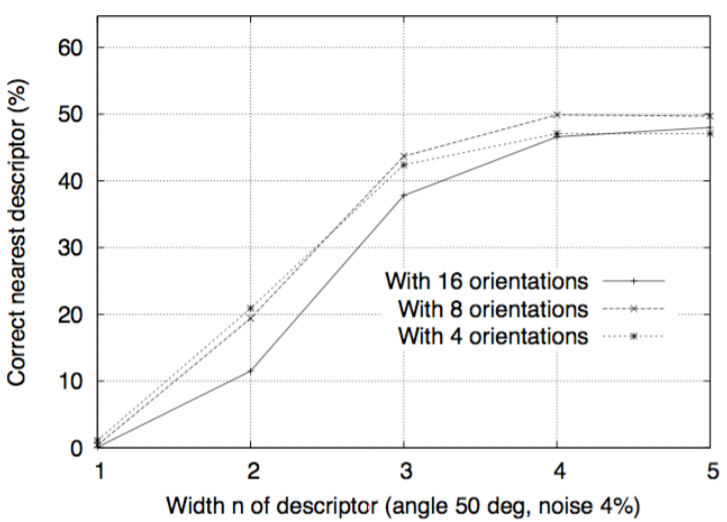
梯度直方圖的方向分為 8 份與每個區塊為 4x4 是由作者選出最佳的參數結果
- 8 方向的直方圖,4x4 個直方圖陣列,會有 8x4x4=128 個向量
- SIFT 描述子是一個長度為 128 的向量,並有帶有旋轉不變性與尺度不變性
- 可以比較影像 A 與影像 B 的各自的向量來尋找配對的關鍵點
- 很大的影像梯度通常來自 3D 照明效果(如:眩光),將 128 維向量最大數值限制在 0.2 內,計算完後再進行正規化(乘上 256)
SIFT 測試結果
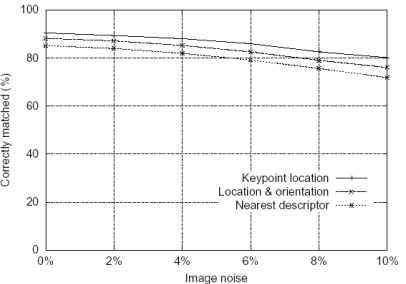
在隨機改變影像尺度、角度,再加上一定的 noise 的 dataset 下的特徵比對結果
在隨機改變影像尺度、角度、仿射變換並加入 2%的 noise 的 dataset,對 30000 個特徵進行最鄰近點搜尋的結果,測試穩定性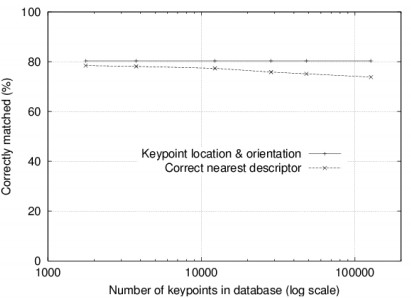
對測試資料進行 30 度的仿射變換與 2%的 noise 後提取特徵點,計算單點最鄰近搜尋的準確率
SIFT 結論
- SIFT 是一個具有尺度不變性、旋轉不變性,並具有獨特性的關鍵點提取方法
- 有效率的計算速度,可以在一般的 PC 上做到接近即時處理的效果
- 論文中也展示使用關鍵點加上最鄰近搜尋來進行物件檢測