setup
Composition API 功能要寫在setup裡面
1 | <script> |
也可以寫成
1 | <script setup> |
ref
- 定義響應性數據
- 參數名稱要+.value來修改資料
1 | <template> |
Composition API 功能要寫在setup裡面
1 | <script> |
也可以寫成
1 | <script setup> |
1 | <template> |
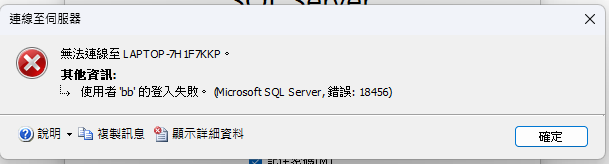
以下可能原因:
實作在右下角顯示多個提示框功能
修改index.html部分, 在body區域新增一個messages用來放置提示框的位置
1 | //index.html |
https://leetcode.com/problems/next-permutation/description/
A permutation of an array of integers is an arrangement of its members into a sequence or linear order.
The next permutation of an array of integers is the next lexicographically greater permutation of its integer. More formally, if all the permutations of the array are sorted in one container according to their lexicographical order, then the next permutation of that array is the permutation that follows it in the sorted container. If such arrangement is not possible, the array must be rearranged as the lowest possible order (i.e., sorted in ascending order).
Given an array of integers nums, find the next permutation of nums.
The replacement must be in place and use only constant extra memory.
Web 開發的第一原則: 第一步就是在瀏覽器上使用F12開啟開發者控制台,Network標籤可以看到Web與伺服器使用HTTP的所有通信, Console標籤可以看到所有在程式內Deubug用的訊息
HTTP GET 是一種 HTTP 請求方法,通常用於獲取網頁上的資源。在進行網路傳輸時,HTTP GET 方法可以向伺服器發送請求,以獲取伺服器上的資源。這些資源可以是網頁、影像、檔案等,而 HTTP GET 方法獲取資源的方式是透過 URL(Uniform Resource Locator,統一資源定位符)進行定位。
HTTP GET 方法是一種安全且幾乎無副作用的請求方法。使用 HTTP GET 方法,客戶端可以向伺服器發送請求,要求伺服器回應一個資源。當伺服器接收到 HTTP GET 請求後,會查找對應的資源,然後將其返回給客戶端。
HTTP GET 方法的請求是無副作用的,即不會對伺服器上的資源進行任何更改。這意味著使用 HTTP GET 方法,客戶端只能獲取伺服器上的資源,而不能修改或刪除它們。
HTTP GET 特色
vue核心功能是聲明式渲染:不用關心渲染過程怎麼樣,只要告訴機器最終結果是甚麼就好
在template標籤內的語法用{{ }}渲染動態文字, 可以根據js當前狀態去改變現在HTML的樣子
1 | <script> |
{{ }}內可以執行任何js表達式, ex:
1 | <h1>{{ message.split('').reverse().join('') }}</h1> |